
wheelchair robo

| An incredible invention for disabled person: A robotic wheelchair with wheels that behave like legs can step onto curbs and up short flights of stairs. The technology could be revolutionary for people with limited mobility. The wheelchair is under development at Chiba Institute of Technology in Japan. It looks like a typical wheelchair that rolls along on four wheels, but when it reaches a step, a suite of sensors assesses the obstacle, adjusts the chair accordingly and maneuvers its wheels like legs to get over the hurdle. When moving on uneven ground, such as a bumpy lawn en route to meet friends for a picnic, the robot controls the seat to keep it level. The chair also has a few other tricks, including the ability to line all its wheels and stabilizers up in a straight line in order to pivot in a tight circle. For now, the wheelchair robot is exclusively a concept prototype. Going forward, the team plans to try out the chair with a variety of users and fine tune it for market |
|
0 Comments
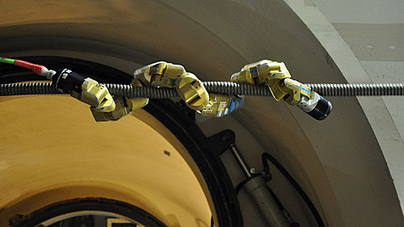 SNAKE ROBOT SNAKE ROBOT A CMU press release (PDF format) describes a recent field test of CMU's modular snake robot in which it navigates inside an Austrian nuclear power plant.
The robot moved through pipes, open valves, and inside various types of vessels. From the press release: "Our robot can go places people can’t, particularly in areas of power plants that are radioactively contaminated,” “It can go up and around multiple bends, something you can’t do with a conventional borescope, a flexible tube that can only be pushed through a pipe like a wet noodle" The robot is 37 inches long, made up of 16 modules that have two half-joints each, giving the robot a total of 16 degrees of freedom. It can emulate the gaits of a natural snakes but can also configure itself in unique ways not possible for a biological snake. This ppt is based on Robotics (Humanoid Robots) prepared by me for my college event. Do watch it... 
Five robotics fish are set to deploy to waters off the coast of Spain in 18-months time.
The robots were built as part of a three-year joint project by a team at Essex University. Each robot costs nearly 30,000 USD. At about five feet in length these robots certainly are not small, and boast a range of sensors used to detect pollutants in the water. The ‘fish’, designed to detect water pollution, can operate for only eight-hours using an on-board battery, but are otherwise autonomous. Perhaps in future, these fish will become more autonomous and operate for longer periods of time “in the wild” by having power generation devices on-board. The robotic fish could surface, charge its battery using a solar panel, communicate with the research center, then resume its work. 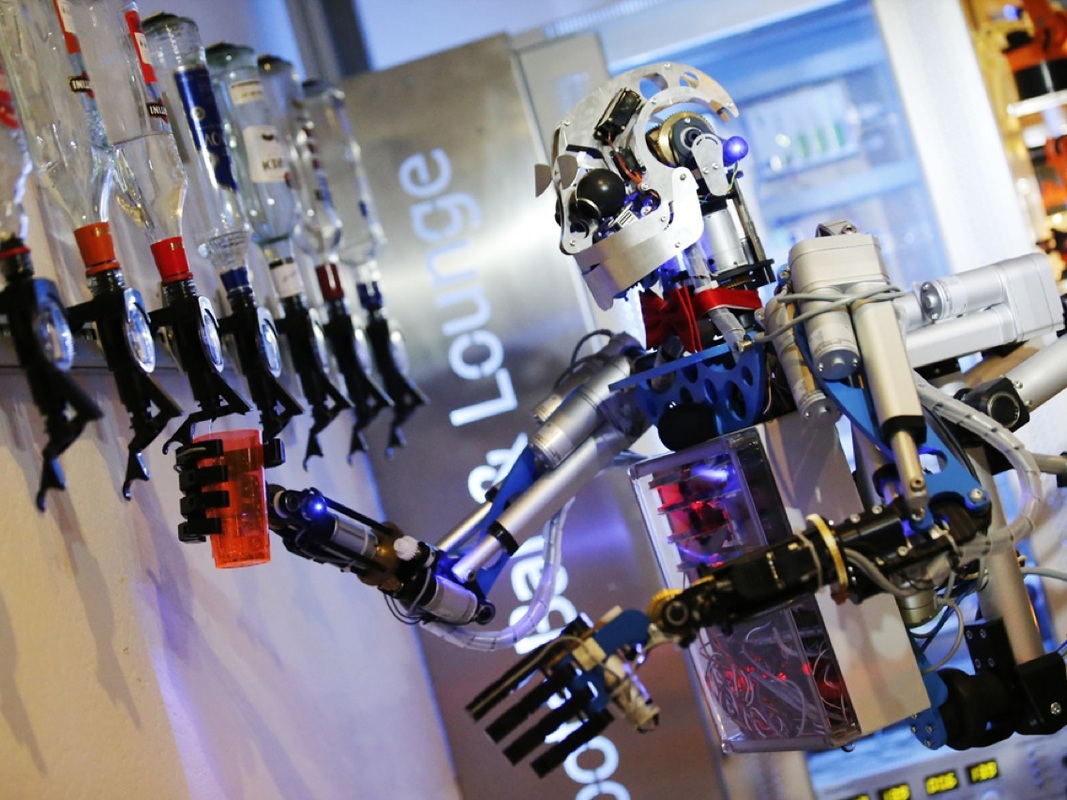
Have you ever imagined a robo as a bartender?
Well its true a robo named "Carl" serves wine at Robots Bar,in Germany. Carl, the humanoid barkeep, will engage you in a short conversation and then help a human bartender prepare you a nice cocktail. Come in, sit down, and chat with the bartender at the Robots Bar and Lounge in Ilmenau, Germany. Featuring with a bordeaux battery, autonomous brewmasters and cork-less wine pours.. Made from parts of discarded industrial robots, Carl wears a sensor-studded belt that keeps him from crashing into the bar or his flesh-and-blood coworkers. Isn't it unique?  An Austrian artist on Thursday drew three pictures simultaneously in three European capitals thanks to two robots copying his every movement in real time in Britain and Germany.
really amazing..... 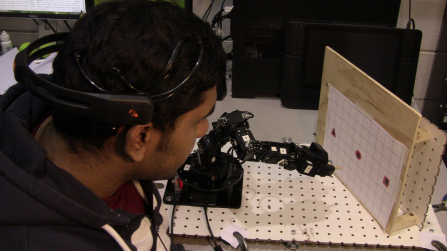
Mind controlled robots
Researchers at the University at Buffalo(UB) and elsewhere are helping to advance technology that allows people to control robots with their minds.
UB is focused onapplying these brain-computer interface (BCI) devices to manufacturing, medicine and other fields. "The technology has practical applications that we're only beginning to explore," said Kesavadas PhD, UB professor. "For example, it could help paraplegic patients to control assistive devices, or it could help factory workers perform advanced manufacturing tasks." While it sounds like something from X-Men and other science fiction stories. Products vary but they generally include a helmet equipped with many sensors. The sensors read electrical signals – electroencephalograms – from brain activity and transmit them wirelessly to a computer. The computer then sends signals to the robot to control the robot's movement. They have been used mostly to help disabled people. It relies on a relatively inexpensive, non-invasive instrument (it retails for $750) that fits on the head like a hat and is outfitted with only 14 sensors. Such robots could be used by factory workers to perform hands-free assembly of products, or carry out tasks like drilling or welding. Download this article below:
 CONTROLS OF ROBOTS (This article deals with controlling of robots) Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots and computer systems for their control. These technologies deal with automated machines that can take the place of humans, in hazardous or manufacturing processes, or simply just resemble humans. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics . The concept and creation of machines that could operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Throughout history,robotics has been often seen to mimic human behavior, and often manage tasks in a similar fashion. Today, robotics is a rapidly growing field, as we continue to research, design, and build new robots that serve various practical purposes, whether domestically , commercially , or militarily.Many robots do jobs that are hazardous to people such as defusing bombs, exploring shipwrecks, and mines. Etymology History Components Controluppet Magnus , a robot- manipulated marionette with complex control systems Control system: The mechanical structure of a robot must be controlled to perform tasks. The control of a robot involves three distinct phases- perception, processing and action (robotic paradigms). Sensors: Sensors give information about the environment or the robot itself (e.g. the position of its joints or its end effector). This information is then processed to "calculate the appropriate signals to the actuators (motors) which move the mechanical. The processing phase can range in complexity. At a reactive level, it may translate raw sensor information directly into actuator commands.sensor fusion may first be used to estimate parameters of interest (e.g. the position of the robot's gripper) from noisy sensor data. An immediate task (such as moving the gripper in a certain direction) is inferred from these estimates. Techniques from control theory convert the task into commands that drive the actuators. At longer time scales or with more sophisticated tasks, the robot may need to build and reason with a "cognitive" model. "Cognitive models" try to represent the robot, the world, and how they interact. Pattern recognition and computer vision can be used to track objects. Mapping techniques can be used to build maps of the world. Finally, motion planning and other artificial intelligence techniques may be used to figure out how to act. For example, a planner may figure out how to achieve a task without hitting obstacles, falling over, etc. Control systems may also have varying levels of autonomy. 1] Direct interaction is used for haptic or tele-operated devices, and the human has nearly complete control over the robot's motion. 2] Operator-assist modes have the operator commanding medium- to-high-level tasks, with the robot automatically figuring out how to achieve them. 3] An autonomous robot may go for extended periods of time without human interaction. Higher levels of autonomy do not necessarily require more complex cognitive capabilities. For example, robots in assembly plants are completely autonomous, but operate in a fixed pattern. Another classification takes into account the interaction between human control and the machine motions. 1] Teleoperation: A human controls each movement, each machine actuator change is specified by the operator. 2] Supervisory: A human specifies general moves or position changes and the machine decides specific movements of its actuators. 3] Task-level autonomy: The operator specifies only the task and the robot manages itself to complete it. 4] Full autonomy: The machine will create and complete all its tasks without human interaction. ISAAC ASIMOV: Let’s start with the three fundamental Rules of Robotics....
1: a robot may not injure a human being, or, through inaction, allow a human being to come to harm. 2: a robot must obey the orders given it by human beings except where such orders would conflict with the First Law. 3: a robot must protect its own existence as long as such protection does not conflict with the First or Second Laws. humans are addicted to technologies...
technology leads... |
AuthorHie guys i'm pallav Archives
August 2014
Categories
|
||
 RSS Feed
RSS Feed
